Abstract
Camera images saved in raw format are being adopted in computer vision tasks since raw values represent minimally processed sensor responses.
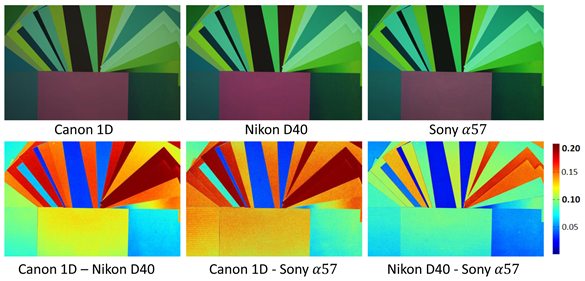
Camera manufacturers, however, have yet to adopt a standard for raw images and current raw-rgb values are device specific due to different sensors spectral sensitivities.
This results in significantly different raw images for the same scene captured with different cameras.
This paper focuses on estimating a mapping that can convert a raw image of an arbitrary scene and illumination from one camera's raw space to another.
To this end, we examine various mapping strategies including linear and non-linear transformations applied both in a global and an illumination-specific manner.
We show that illumination-specific mappings give the best result, however, at the expense of requiring a large number of transformations.
To address this issue, we introduce an illumination-independent mapping approach that uses white-balancing to assist in reducing the number of required transformations.
We show that this approach achieves state-of-the-art results on a range of consumer cameras and images of arbitrary scenes and illuminations.
Publications:
- Raw-to-raw: Mapping between image sensor color responses, [pdf][bibtex], CVPR 2014.
Datasets
Calibration sets
Please check the following links to download the available calibration datasets. These dataset contains images of colorchart (RAW, JPG and MAT formats) under 5 different lighting
conditions by eight different cameras: Canon 1Ds Mark III, Canon EOS 600D, Nikon D40, Nikon D5200, Olympus E-PL6, Panasonic DMC-GX1X, Samsung NX2000, and Sony A57. MAT files
contain 164 raw-rgb values extracted from 2 colorchart. The first 24 values for the left colorchart and the last 140 values for the right colorchart. For each colorchart, values
are extracted from left to right and top to bottom. The datasets are divided into 2 groups:
Experiment sets
Please check the following links to download the available experiment datasets.
These datasets contain images are taken under the same scene by eight different cameras: Canon 1Ds Mark III, Canon EOS 600D, Nikon D40, Nikon D5200, Olympus E-PL6, Panasonic DMC-GX1X, Samsung NX2000, and Sony A57.
The images are aligned and cropped to be as similar as possible and are stored under 16-bit PNG format.
The datasets are divided into 3 groups:
- Canon 1Ds Mark III, Nikon D40, and Sony A57
- Canon 600D, Nikon D5200, Olympus E-PL6, Panasonic DMC-GX1X, and Samsung NX2000
- Canon 1Ds Mark III, Canon EOS 600D, Nikon D40, Nikon D5200, Olympus E-PL6, Panasonic DMC-GX1X, Samsung NX2000, and Sony A57